In questa pagina vediamo un altro tema d’esame di fisica 1. Sarà l’ultimo, ma non vi preoccupate: se sapete fare questi esami siete pronti a fronteggiare un esame vero. Cercate di capirli e, soprattutto, usate le formule del formulario.
Esercizio 1
Un corpo di massa si trova appoggiato su una rotaia orizzontale liscia, con velocità iniziale
. Sul corpo agisce una forza orizzontale
, proporzionale alla velocità, che lo accelera ulteriormente per una lunghezza
e poi cessa. La velocità finale dopo questo tratto è
. Il corpo, non più soggetto alla forza, imbocca una rotaia circolare disposta su un piano verticale, di raggio
. Calcolare:
- L’impulso esercitato dalla forza
.
- La costante k della forza che imprime l’accelerazione iniziale.
- La forza totale
, in modulo, a cui è soggetto il corpo quando ha percorso un quarto di cerchio.
- La reazione vincolare
a cui è soggetto il corpo nel punto più alto.
Ci viene fornita questa figura:

SOL:
a. Dobbiamo calcolare l’impulso della forza.
Intanto guardiamo il disegno, anche se penso sia abbastanza chiaro: nessuno di voi ha mai giocato con le macchinine hotwheels? Pensate che l’oggetto sia una macchina che deve fare il giro della morte. Non c’è attrito tra la rotaia e la macchinina (perché dicono che la rotaia è liscia). La macchinina, se è abbastanza veloce, rimarrà attaccata alla rotaia grazie alla forza centrifuga.
Sappiamo che la forza viene applicata per un tratto di lunghezza e sappiamo la velocità iniziale e finale.
Nel formulario è presente la formula per trovare l’impulso:
L’integrale non sembra l’idea migliore perché il testo ci fornisce la velocità finale e iniziale.
Guardate l’equazione seguente:
E’ bellissima, sappiamo che la quantità di moto è definita così: . L’equazione ci dice che l’impulso è pari alla variazione della quantità di moto. Noi sappiamo sia la velocità iniziale, sia la velocità finale:
b. Dobbiamo calcolare la costante .
- METODO 1:
Possiamo utilizzare la seconda legge di Newton sapendo chee poi integrare entrambi i membri della relazione
. Chiaramente, prima di integrare bisogna semplificare le
e portare a primo membro il
.
Questo metodo non mi piace perché c’è un passaggio non banale: nella prima relazione che ho scritto bisogna moltiplicare e dividere per.
Adesso lo spieghiamo con calma.
Prendiamo la seconda legge di Newton, sapendo che:
Siccome l’accelerazione è la derivata della velocità possiamo scrivere:
Ci sono svariati metodi per fare questo conto: potremmo portare ila primo membro, la
. Per trovare il tempo finale dovremmo utilizzare le leggi del moto rettilineo uniformemente accelerato. Si può fare ma è lungo.
La seconda possibilità è cercare di eliminare il
Moltiplichiamo e dividiamo per
Siccome sappiamo che la derivata dello spazio è la velocità possiamo scrivere:
Semplifichiamo le velocità e portiamo a primo membro il
Integriamo. Noi sappiamo che la lunghezza finale è. Inoltre conosciamo velocità iniziale e finale.
Otteniamo:
Da questa formula possiamo trovare la costante.
- METODO 2:
Possiamo sfruttare la definizione di impulso di una forza:
Sappiamo che la velocità è la derivata dello spazio:
Il bello è che il
Notate che abbiamo cambiato gli estremi di integrazione: siccome integriamo rispetto allo spazio (non al tempo) mettiamo gli estremi corrispondenti allo spazio.
Da qui si può trovare la costante
I metodi sono identici. Ci sono sempre almeno due strade per raggiungere il risultato.
Proseguendo con il METODO 2 abbiamo:
c. Dobbiamo trovare la forza a cui è sottoposto il corpo dopo aver percorso un quarto di cerchio.
Nella figura iniziale è evidenziata la posizione del corpo dopo aver percorso un quarto di cerchio.
Sul corpo agiscono due forze: la reazione vincolare e la forza peso.
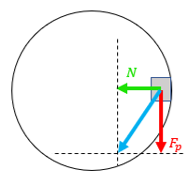
La forza totale a cui è soggetto il corpo è la freccia azzurra e si calcola con il teorema di Pitagora:
La forza peso è facile da calcolare:
La reazione vincolare, siccome il corpo si muove di moto circolare, è la forza centripeta del moto circolare uniforme:
Il problema è che non conosciamo la velocità del corpo.
Possiamo però trovarla utilizzando la conservazione dell’energia.
L’energia meccanica si conserva. All’inizio il corpo è ad altezza nulla e sta viaggiando con velocità , quindi ha solo l’energia cinetica. Quando il corpo è ad un quarto di cerchio, esso è ad un’altezza pari a
e ha una velocità
; esso ha quindi energia potenziale gravitazionale e energia cinetica.
L’energia meccanica iniziale è:
L’energia meccanica finale è:
Per la conservazione dell’energia, l’energia finale e quella iniziale devono essere uguali. Così troviamo la velocità:
Fino a qui abbiamo scritto solo equazioni e cercato di ricavare i dati mancanti. Siccome ci mancava una velocità e avevamo già la velocità iniziale, abbiamo deciso di usare la conservazione dell’energia.
Possiamo dunque trovare la reazione vincolare:
E da qui otteniamo la forza totale a cui è sottoposto il corpo:
d. Dobbiamo trovare la reazione vincolare a cui è soggetto il corpo nel punto più alto.
Questo punto è molto simile al precedente.

Sappiamo che, per la legge di Newton:
La reazione vincolare e la forza peso sono entrambe dirette verso il basso, quindi hanno lo stesso verso. Inoltre l’accelerazione centripeta è quella del moto circolare perché l’accelerazione tangenziale non è causata da queste due forze.
Adesso però abbiamo lo stesso problema di prima: ci manca la velocità. Per trovarla utilizziamo la conservazione dell’energia.
L’energia meccanica iniziale è l’energia cinetica, ed è la stessa di prima:
L’energia meccanica finale è la somma tra l’energia cinetica e l’energia potenziale gravitazionale. Questa volta il corpo si trova ad un altezza pari a .
Scriviamo:
Siccome l’energia si conserva possiamo scrivere:
Sono andato un po’ più veloce nella spiegazione perché i concetti sono gli stessi del punto precedente.
Adesso che abbiamo la velocità possiamo sostituirla nella formula iniziale:
Non ci resta che trovare la reazione vincolare:
Con questo esercizio abbiamo visto ancora una volta la conservazione dell’energia e come trattare le reazioni vincolari con la seconda legge di Newton: grazie al fatto che il moto è circolare abbiamo potuto usare le formule dell’accelerazione centripeta.
Quando vi chiedono il valore di una forza, la prima cosa da fare è cercare di capire se è possibile trovarla utilizzando la seconda legge di Newton. Se non si può bisogna trovare un altro modo.
Esercizio 2
Due dischi omogenei di masse e raggi rispettivamente ,
,
,
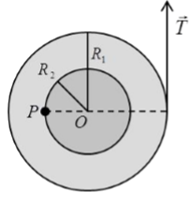
sono incollati concentricamente l’uno all’altro. I dischi sono disposti su un piano verticale, imperniati su un asse che passa per il punto P a distanza
dal centro comune O. Inizialmente la congiungente centro-asse è orizzontale e il sistema è mantenuto in equilibrio da una fune che agisce in verticale verso l’alto, connessa all’estremo del disco 1. La fune viene poi tagliata ed il sistema comincia a ruotare verso il basso. Calcolare:
- Il valore della tensione T che garantisce l’equilibrio iniziale.
- L’accelerazione angolare iniziale del sistema immediatamente dopo che la fune è stata tagliata.
- La velocità angolare del sistema nel punto più basso.
- La reazione vincolare sul perno P nel punto più basso.
Ci viene fornita questa figura:
SOL:
a. Calcoliamo la tensione della fune.
Prima di iniziare i conti guardiamo la figura per assicurarci di avere chiara la situazione. Pensate di avere due orologi concentrici appesi al muro: quelli sono i due cerchi. Sono appesi al muro grazie ad un chiodo nel punto P. E’ chiaro che i due orologi tendono a mettersi “dritti” cioè tenderebbero a far diventare verticale la retta tratteggiata in figura. Noi però li teniamo su grazie ad una fune.
Il sistema è in equilibrio. Questo significa che gli orologi (che tenderebbero a ruotare attorno a P) non ruotano per effetto della tensione della corda.
Come nell’Esame 3, scriviamo l’equilibrio dei momenti delle forze: non c’è rotazione rispetto al punto P, quindi la somma dei momenti delle forze rispetto a P è nulla.
Qui potremmo anche usare la legge di Newton dicendo che la somma delle forze in direzione verticale è nulla. Avremmo però due incognite (la tensione della fune e la reazione vincolare in P), quindi non riusciremmo a trovare la tensione.
Guardiamo la figura per capire i momenti delle forze:

Rispetto al punto P ci sono tre momenti: due momenti delle forze peso e un momento della tensione.
Il braccio della forza è quello che congiunge il punto P al punto dove la forza è applicata, quindi il braccio della tensione è perché la distanza PO è
, mentre la restante distanza è
.
State attenti ai segni dei momenti: utilizziamo la regola della mano destra. Il pollice indica il braccio, l’indice indica la forza, il medio dà il verso del momento. Vediamo che i momenti delle due forze peso sono “entranti” (cioè punta verso la figura, non verso di noi), mentre il momento della tensione è “uscente” (cioè viene verso di noi che leggiamo). Quindi scegliamo che i momenti uscenti sono positivi, mentre quelli entranti negativi. Ovviamente questa è una convenzione, si può anche scegliere che quelli uscenti siano negativi e quelli entranti positivi, non cambia niente.
Scriviamo l’equilibrio dei momenti, tenendo presente che quelli uscenti (il momento della tensione) sono positivi, mentre quelli entranti (i momenti delle forze peso) sono negativi.
Sappiamo che il momento di una forza è il prodotto tra braccio e forza: .
Otteniamo:
E’ semplice qui fare i conti, sapendo che .
Attenzione però: i raggi sono in centimetri, per fare i conti dobbiamo avere i raggi in metri quindi bisogna convertirli.
Otteniamo:
Troviamo così la tensione della fune:
b. Troviamo l’accelerazione angolare del sistema dopo che la fune è stata tagliata.
Cosa succede dopo che la fune viene tagliata? I due dischi iniziano a ruotare attorno al perno P. Essi ruotano per effetto del momento della forza peso e noi sappiamo che il momento delle forze agenti sul corpo (cioè le due forze peso) è, per la seconda equazione cardinale, pari a:
Il pedice “p” indica che il momento viene calcolato rispetto al punto P. In questo modo troviamo l’accelerazione angolare con cui il sistema ruota attorno al punto P.
Qual è il momento d’inerzia del sistema rispetto al punto P? La somma tra i momenti d’inerzia dei due dischi rispetto a P.
Noi abbiamo tabulato il momento d’inerzia di un disco rispetto al suo centro di massa, cioè abbiamo il momento d’inerzia dei due dischi rispetto al punto O.
Per trovare il momento d’inerzia del disco rispetto al punto P usiamo Huygens-Steiner:
Nella formula è il momento d’inerzia del disco rispetto al suo centro di massa (tabulato), mentre
è la distanza tra il centro di massa (punto O) e il punto rispetto al quale voglio calcolare il momento d’inerzia (cioè il punto P). La distanza tra O e P è
. Otteniamo:
Il momento d’inerzia del secondo disco si calcola allo stesso modo:
Possiamo dunque calcolare il momento d’inerzia dei due corpi rispetto al punto P:
Adesso riusciamo ad utilizzare la formula scritta all’inizio:
Il momento delle forze peso è la somma tra i due momenti (esattamente come abbiamo fatto nel punto precedente):
Possiamo quindi calcolare l’accelerazione angolare:
In questo punto è molto importante il teorema di Huygens-Steiner: esso ci consente di trovare il momento d’inerzia rispetto ad un asse qualsiasi sapendo il momento d’inerzia rispetto al centro di massa. In pratica ci ha permesso di trovare il momento d’inerzia rispetto a P sapendo il momento d’inerzia rispetto ad O. Non è molto difficile da applicare: il momento d’inerzia rispetto al centro di massa è tabulato, mentre per l’altro termine () bisogna sapere la distanza tra il centro di massa (nel nostro caso, il punto O) e il punto rispetto al quale si vuole calcolare il momento d’inerzia (nel nostro caso, il punto P).
c. Dobbiamo calcolare la velocità angolare nel punto più basso.
Non abbiamo a disposizione molti dati: sappiamo che il corpo (disco 1 + disco 2) parte da fermo e gira fino ad arrivare con una certa velocità angolare nella posizione in figura.

Avendo pochi dati utilizziamo la conservazione dell’energia meccanica.
L’energia meccanica iniziale è nulla perché il corpo parte da fermo e l’energia potenziale è nulla per come abbiamo scelto il sistema di riferimento: inizialmente il centro di massa (punto O) ha la stessa altezza del punto P e noi abbiamo scelto di considerare tale altezza come l’altezza . Così facendo l’altezza finale del punto O risulta negativa.
Chiaramente potevate scegliere un altro sistema di riferimento e allora avreste avuto un’altezza iniziale e un’altezza finale diverse da quelle che andiamo a scrivere adesso. Se per esempio aveste scelto come altezza l’altezza del punto O nella figura precedente, avreste avuto un’energia potenziale iniziale perché il punto O all’inizio è ad un altezza
rispetto all’altezza che noi abbiamo considerato nulla.
Il concetto è: scegliete il sistema di riferimento che volete ma siate coerenti.
Noi scegliamo il sistema di riferimento della figura precedente quindi , cioè l’altezza del punto O all’inizio è nulla perché il punto O giace su una retta orizzontale alla stessa altezza di P.
Quindi l’energia meccanica iniziale, data dalla somma tra energia cinetica di rotazione e energia potenziale gravitazionale, è nulla perché la velocità angolare iniziale e l’altezza iniziale sono nulle:
L’energia meccanica finale invece non è nulla perché il corpo ha una certa velocità angolare e una certa energia potenziale gravitazionale dovuta al fatto che il punto O è ad un’altezza :
Nella formula precedente abbiamo preso perché il corpo ruota attorno al punto P. L’energia potenziale gravitazionale dei due dischi è data dalla somma delle energie potenziali. Siccome il centro di massa è lo stesso, abbiamo fatto semplicemente la somma tra le masse. In pratica stiamo dicendo che i due dischi possono essere visti come un’unica forza peso applicata al punto O. Questa forza peso è
.
La formula dell’energia potenziale gravitazionale è ed è presente nel formulario.
Adesso noi sappiamo che l’energia meccanica si conserva, quindi possiamo dire che l’energia iniziale e quella finale sono uguali:
Sostituendo i numeri e sapendo che possiamo trovarci la velocità angolare:
d. Calcoliamo la reazione vincolare nel punto più basso.
La figura è la seguente:

Chiaramente la reazione vincolare è verso l’alto perché deve bilanciare le forze peso che sono verso il basso.
La cosa più furba da fare è utilizzare la seconda legge di Newton, che ci permette di mettere in relazione le forze con l’accelerazione del centro di massa (perché in un corpo rigido si mette in relazione forze e moto del centro di massa). La seconda legge di Newton quando parliamo di corpi rigidi viene chiamata Prima equazione cardinale, quindi in sostanza noi adesso stiamo utilizzando la prima equazione cardinale.
La prima equazione cardinale è la seguente:
La risultante delle forze esterne () è la somma tra le forze che ci sono in gioco: sull’asse verticale abbiamo due forze peso e una reazione vincolare.
L’accelerazione del centro di massa è l’accelerazione centripeta di un moto circolare perché il centro di massa si muove di moto circolare attorno al perno P. Come facciamo a capire che è l’accelerazione centripeta? Le forze che stiamo considerando sono tutte dirette verso il centro di rotazione quindi causano un’accelerazione centripeta (cioè diretta verso il centro) e non tangenziale.
Possiamo dunque riscrivere la seconda equazione cardinale come segue:
Chiaramente la massa totale è la somma tra le masse. I segni sono dovuti al fatto che la reazione vincolare è opposta alle forze peso. Noi scegliamo che la reazione vincolare sia positiva perché ha lo stesso verso dell’asse y, quindi è concorde con il sistema di riferimento scelto.
In un moto circolare l’accelerazione centripeta è:
La formula precedente funziona perché il raggio della traiettoria circolare fatta dal punto O attorno a P è (guardate la figura per capirlo).
La velocità angolare è quella che abbiamo ottenuto nel punto precedente.
Sostituendo tutte le informazioni nella prima equazione cardinale troviamo:
Da qui sostituendo i numeri otteniamo la reazione vincolare:
Notate che anche in questo esercizio abbiamo usato le equazioni cardinali (la somma dei momenti agenti è nulla perché i dischi sono in equilibrio; la risultante delle forze agenti è pari al prodotto tra massa e accelerazione del centro di massa) e la conservazione dell’energia meccanica.
Abbiamo inoltre utilizzato il teorema di Huygens-Steiner che serve per calcolare il momento d’inerzia rispetto ad un asse che non passa per il centro di massa.
Esercizio 3
Tre moli di gas perfetto monoatomico si trovano in un cilindro con stantuffo mobile con volume iniziale , a contatto termico con una sorgente a temperatura
. Il sistema viene fatto espandere reversibilmente sempre a contatto con la sorgente. Nello stato finale B l’entropia del sistema è aumentata di
. Poi il gas viene isolato termicamente, e lo si fa espandere ancora in maniera reversibile fino a che raggiunge la temperatura
. Si toglie l’isolamento termico e il sistema è posto a contatto con una sorgente a temperatura
e compresso reversibilmente, fino a raggiungere il volume iniziale
. Infine il gas viene messo a contatto con la sorgente
e riportato a volume costante allo stato di equilibrio iniziale. Calcolare:
- Il volume
.
- Il volume
.
- Il calore scambiato nel ciclo.
- Il rendimento del ciclo.
- La variazione di entropia dell’universo nel ciclo.
SOL:
a. Dobbiamo trovare il volume nello stato B.
La trasformazione AB è un’isoterma reversibile perché il gas viene fatto espandere a contatto con la sorgente, quindi non modifica la sua temperatura.
La trasformazione BC è un’adiabatica reversibile perché il gas è stato isolato termicamente, quindi non scambia calore con l’esterno.
Poi abbiamo la trasformazione CD che è un’altra isoterma reversibile perché il gas rimane a contatto con una sorgente a temperatura .
Infine la trasformazione DA è un’isocora (non reversibile perché non ci dicono che è reversibile) perché il gas viene riportato a volume costante allo stato A.
Graficamente, quindi, si ha questo ciclo:

Adesso possiamo cominciare con l’esercizio. Come facciamo a trovare ?
La trasformazione AB è un’isoterma reversibile e il testo ci fornisce la variazione di entropia. Nel formulario abbiamo la formula della variazione di entropia in un’isoterma reversibile:
Il numero di moli è pari a 3, mentre il volume va convertito in unità di misura del sistema internazionale. Un litro corrisponde ad un decimetro cubo, quindi
.
Possiamo trovarci il volume :
b. Dobbiamo trovare il volume .
Sappiamo che BC è un’adiabatica reversibile, quindi valgono le leggi delle adiabatiche reversibili.
Per un gas monoatomico abbiamo i seguenti valori:
Noi conosciamo ,
e
quindi sceglieremo la legge che lega temperature e volumi:
Da qui ci ricaviamo agilmente il volume dello stato C:
Chiaramente nella formula precedente perché la trasformazione AB è un’isoterma.
c. Calcoliamo adesso il calore scambiato nel ciclo.
Il calore scambiato in tutto il ciclo è, banalmente, la somma tra i calori scambiati nelle varie trasformazioni.
Ricordiamoci che BC è adiabatica quindi .
Basta trovarsi questi calori con le formule ed il gioco è fatto.
La trasformazione AB è isoterma reversibile e sappiamo (dal formulario) che il calore scambiato in un’isoterma reversibile è:
La trasformazione CD è un’isoterma, quindi il calore si calcola con la formula che abbiamo appena usato. Sappiamo che il volume finale è .
Otteniamo:
Il calore scambiato nell’isocora DA, sapendo che , è dato dalla formula:
Quindi troviamo il calore scambiato nel ciclo:
d. Calcoliamo il rendimento del ciclo.
Il rendimento, per definizione, è dato dalla seguente formula:
Non ha senso che calcoliamo il lavoro perché abbiamo già calcolato il calore scambiato in ogni trasformazione.
Il calore ceduto dal gas è quello che ha segno negativo (), mentre il calore assorbito dal gas è quello con segno positivo (
e
).
La formula del rendimento diventa:
E’ una macchina termica che fa abbastanza schifo perché ha un rendimento basso.
e. Troviamo la variazione di entropia dell’universo nel ciclo.
La variazione di entropia dell’universo nel ciclo è pari alla somma tra le variazioni di entropia dell’universo nelle varie trasformazioni:
La variazione di entropia dell’universo è nulla nelle trasformazioni reversibili. Questo significa che non c’è variazione di entropia dell’universo nelle trasformazioni AB, BC e CD.
La trasformazione DA è irreversibile (nel testo non ci hanno detto che è reversibile quindi non lo è). La variazione di entropia dell’universo è data dalla somma tra la variazione di entropia del sistema e della sorgente.
Per calcolare la variazione di entropia del sistema (cioè del gas) in un’isocora usiamo la seguente formula:
La variazione di entropia dell’ambiente (cioè della sorgente a temperatura perché il gas scambia calore con tale sorgente) è facile da calcolare perché abbiamo già trovato il calore scambiato in tale trasformazione. La formula per trovare la variazione di entropia dell’ambiente è:
Quindi possiamo trovare la variazione di entropia dell’universo nel ciclo:
Abbiamo così terminato i temi d’esame. Assicuratevi di sapere fare questi esami perché in questi esercizi ci sono domande che capitano spesso.
Fai click sul menu in alto per passare ad altre lezioni o esercizi.
Buongiorno,
mi chiedevo perché nell’esercizio 2, punto c, venga ignorata nella formula dell’energia cinetica la parte “consueta” (1/2m*vcm^2). Forse perché il corpo sta solo ruotando? Come faccio a determinarlo a priori negli esercizi?
Grazie mille in anticipo e complimenti per la pagina!
L’energia cinetica 1/2 m*vcm^2 è un’energia cinetica di traslazione del corpo rigido. In questo caso il corpo sta ruotando attorno al punto P, ma non c’è nessuna traslazione proprio perché il punto P ha un perno che impedisce al corpo di traslare.
Negli esercizi, se il corpo sta solo ruotando e vuoi calcolare l’energia cinetica del corpo, essa sarà un’energia cinetica di rotazione. Questo avviene in particolare quando il corpo è vincolato.
Se invece il corpo non è vincolato, quando applichi una forza esso comincia a muoversi e (magari) anche a ruotare. In tal caso hai un moto di rotazione e di traslazione perché il corpo si sta muovendo e contemporaneamente sta ruotando